工程車作業安全防護:從視覺突破到多系統協同的風險防控方案
工程車作業場景中,龐大車身帶來的視覺盲區、嘈雜環境引發的注意力分散,持續推高作業風險。主管部門與企業始終在探索 “防患于未然” 的解決方案,而從作業人員關鍵感知渠道 —— 視覺入手,并結合多系統協同,正成為降低風險的關鍵路徑。
一、工程車作業安全的關鍵痛點:感知局限與環境干擾
工程車作業風險的產生,本質是 “感知能力不足” 與 “作業環境復雜” 的疊加,具體體現在三個層面:
視覺盲區覆蓋廣:工程車(如挖掘機、渣土車)車身龐大,車頭下方、車身兩側、車尾等區域存在大面積視覺盲區,作業范圍越大,盲區覆蓋的風險區域越廣;環境干擾影響判斷:作業現場噪音嘈雜,易導致駕駛員注意力分散,同時削弱聽覺感知能力,進一步降低對周邊風險的判斷力;感知渠道過度依賴視覺:作業人員主要通過聽覺、視覺感知環境與車輛狀態,其中視覺獲取的信息占比超 95%。一旦視覺感知受阻,安全防護便失去關鍵支撐,危險系數明顯上升。
二、關鍵突破:以視覺強化為關鍵的盲區預警系統針對 “視覺感知不足” 這一關鍵痛點,佳興偉誠工程車輛盲區預警系統通過 “硬件采集 + 智能處理 + 精細預警” 的邏輯,構建針對性解決方案,其關鍵設計與工作流程如下:
(一)系統關鍵構成
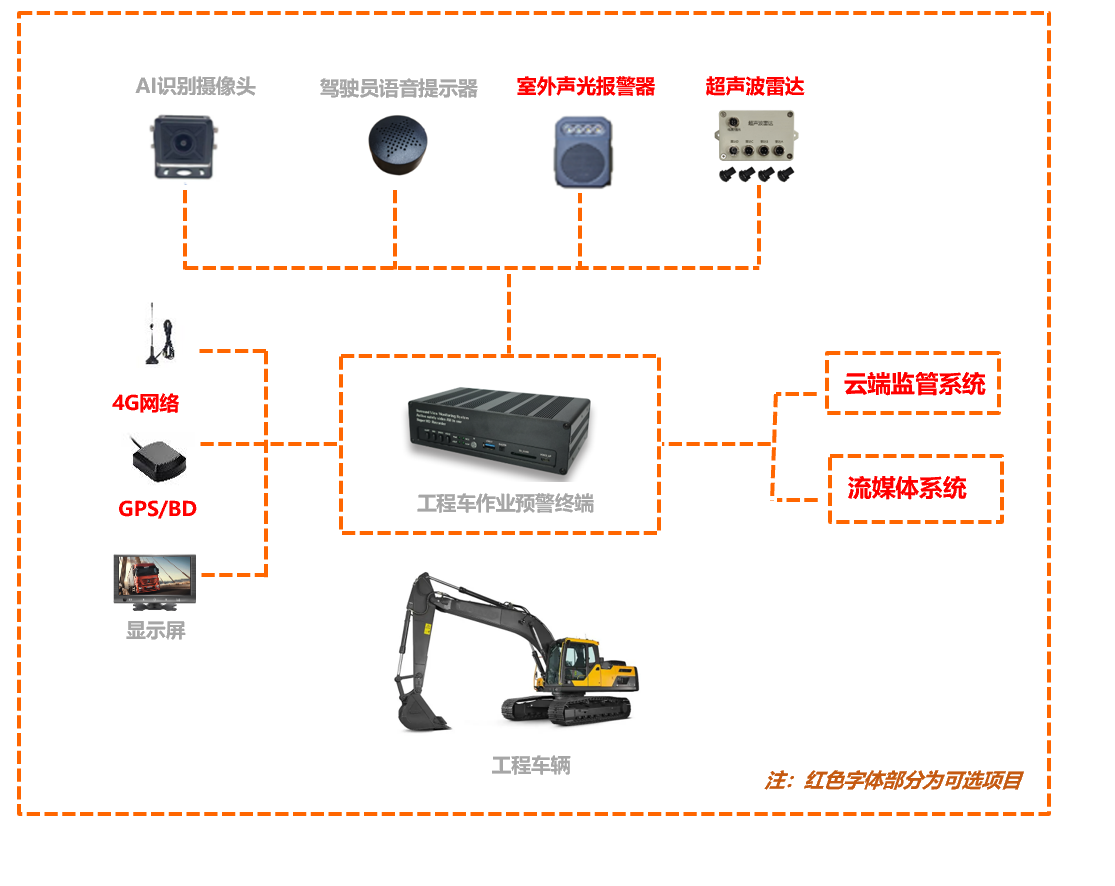
系統圍繞 “視覺強化” 搭建硬件與軟件體系,關鍵組件包括:360 全景盲區預警系統:負責采集車輛四周全維度畫面,消除傳統視覺盲區;車載 AI 視覺攝像頭:精細捕捉行人、非機動車、其他工程車等目標,提供高清圖像數據;車內顯示器:作為信息呈現終端,實時展示全景畫面與重點區域特寫;聲光報警器裝置:承擔風險提示功能,通過視覺與聽覺雙重信號觸發預警。
(二)實時預警工作流程系統通過 “動態監測 - 智能識別 - 分級響應” 實現風險預警,具體步驟為:數據采集與畫面聚焦:360 全景系統實時采集車輛周邊畫面,當檢測到右側(或其他關鍵區域)有工程車靠近、作業人員進入作業范圍時,車內顯示器立即放大對應區域視頻畫面,幫助駕駛員聚焦風險點;距離判斷與預警觸發:系統自動計算目標(車輛、人員)與本車的距離,當距離超過預設安全閾值時,立即觸發聲光報警器,通過車內提示音、屏幕警示標識與車外聲光信號,同步提醒駕駛員與周邊人員。
三、升級方向:車聯網時代的多系統協同防控隨著車聯網技術發展,工程車安全防護已從 “單一視覺強化” 邁向 “多系統協同”,通過多維度風險監測與主動干預,進一步提升安全性,關鍵補充系統包括:異常駕駛行為監測預警:通過攝像頭與傳感器,識別駕駛員疲勞駕駛、接打電話、未系安全帶等行為,及時提醒糾正;前方碰撞預警:實時監測本車與前方車輛、障礙物的距離,當存在碰撞風險時提前預警,為制動預留時間;車道偏離預警:針對工程車在道路行駛階段,監測車輛是否偏離車道,避免因操作失誤引發側向碰撞;緊急制動系統:在預警后駕駛員未及時響應的情況下,系統可觸發緊急制動,主動干預避免事故發生。
四、總結:構建工程車作業安全的全鏈條防護從解決 “視覺盲區” 的單點突破,到 “多系統協同” 的無死角防控,工程車作業安全防護正形成 “感知強化 - 風險預警 - 主動干預” 的全鏈條體系。其中,佳興偉誠工程車輛盲區預警系統作為視覺感知的關鍵支撐,有效填補了傳統駕駛的感知短板;而異常駕駛監測、碰撞預警等系統的補充,則進一步擴大了風險防控范圍,終實現 “防患于未然”,為工程車作業安全提供無死角保障。
